Etape 5 - Projet final
 |
Dans cette étape, vous allez compléter le projet de Machine Learning mis au point à l'étape 3 afin d'assurer la commande de tous les mouvements du véhicule. |
Si besoin, un rappel de la description de l'interface Teachable Machine est donné en ressources en bas de page ![]() .
.
En îlot
|
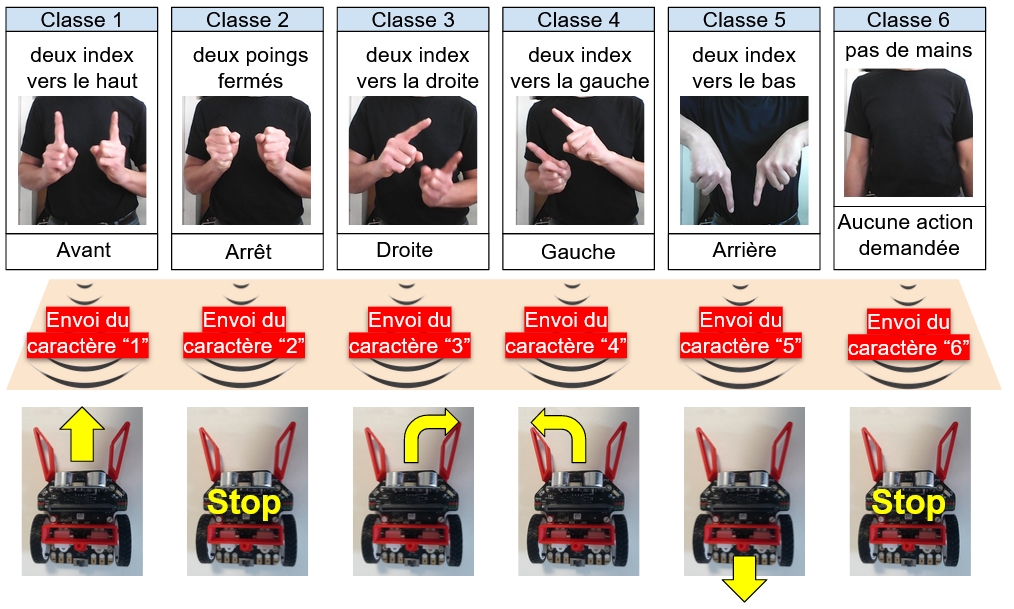
1- Modifier votre projet Teachable Machine et votre programme Vittascience Adacraft pour assurer la commande complète du robot maqueen avec les mains (voir image ci-contre). ATTENTION, dans le cas d'ajout d'échantillons, il est OBLIGATOIRE de contrôler toutes les images afin de supprimer celles qui ne correspondent pas à la classe en question et qui pourraient ainsi fausser l'apprentissage, et de SUPPRIMER LES IMAGES SUR LESQUELLES UN VISAGE EST VISIBLE (en premier plan ou arrière plan). |
|
|
|
2- Tester le fonctionnement complet avec le robot maqueen de votre îlot, modifier ou améliorer le projet Teachable Machine et/ou le programme Vittascience Adacraft si nécessaire jusqu'à obtenir un fonctionnement satisfaisant. ATTENTION manipulations raisonnées sous la responsabilité de l'élève gestionnaire. Lorsque le robot est en marche (commutateur ON/OFF sur ON), un élève de l'îlot doit le surveiller afin de parer tout risque (chute, blocage sur obstacle avec roues qui forcent...). 3- Enregistrer les dernières modifications. 4- Faire tester au professeur pour validation. |
||
 |
Bonus efficacité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 5. |
