T27 Programmation des mouvements du prototype
En îlot
 |
Tâche réalisée en demi-groupe sur un des deux ordinateurs de l'îlot |
Vous allez devoir mettre au point un programme permettant à la carte Arduino Uno d'assurer les déplacements AVANT, ARRIERE, DROITE et GAUCHE ainsi que l'ARRET du robot prototype que vous avez fabriqué.
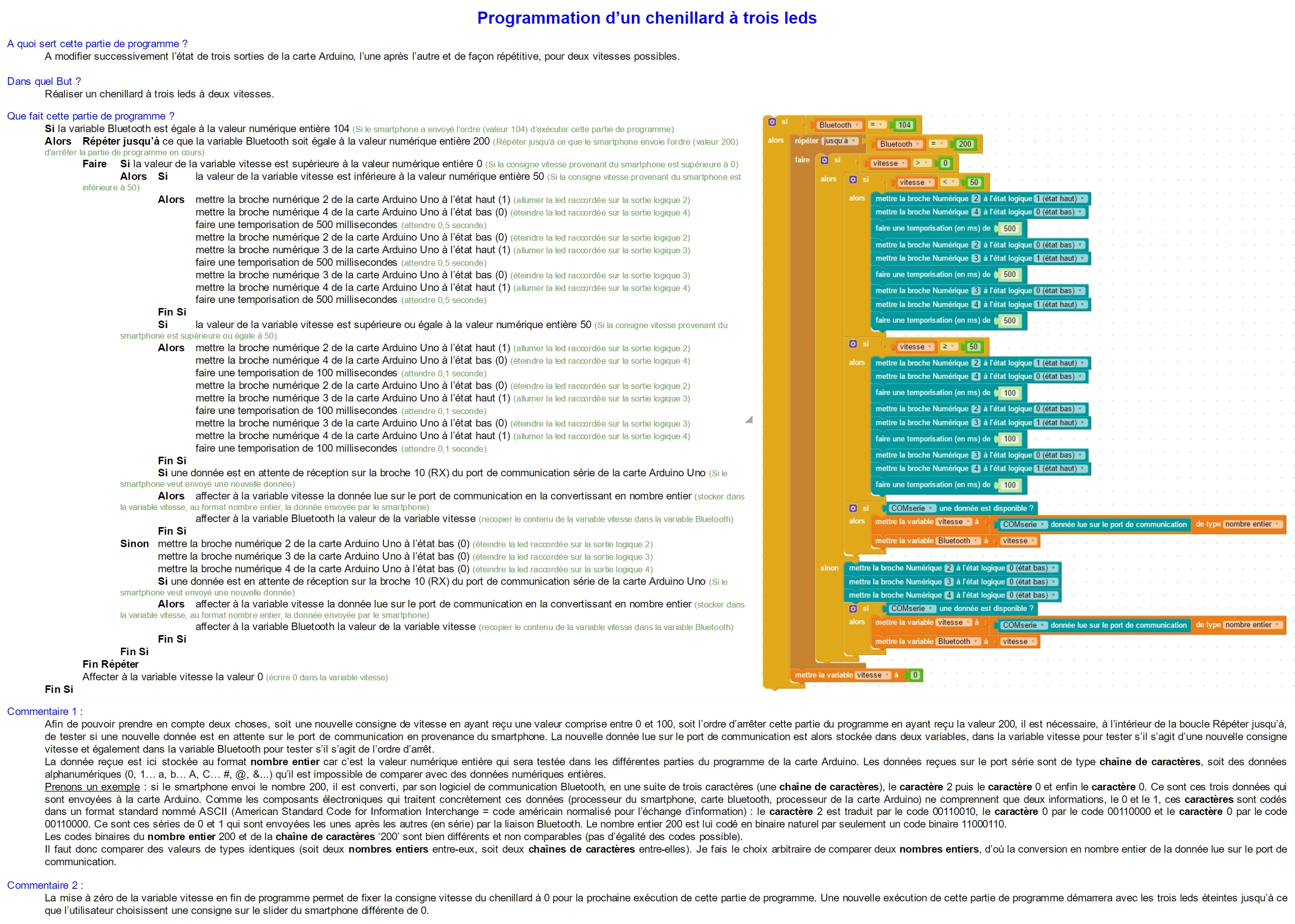
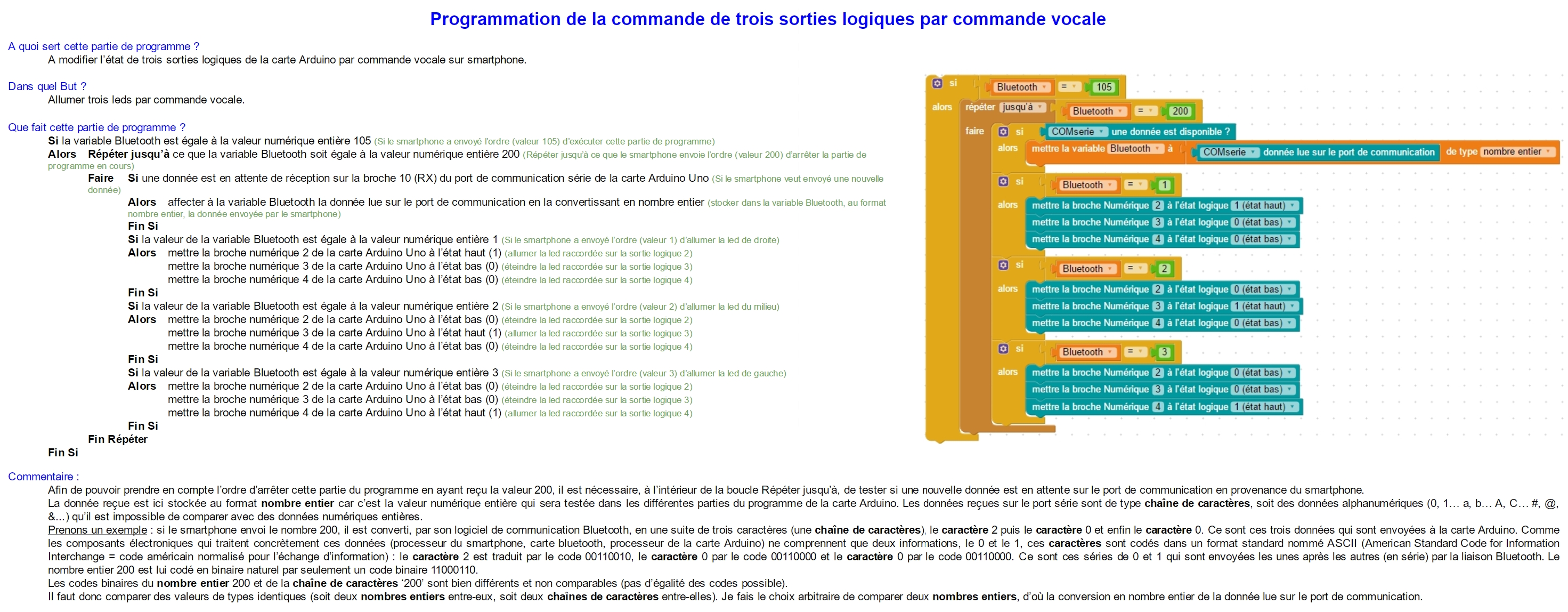
Ce programme sera construit avec le service en ligne Blockly@rduino sous la forme de blocs, puis téléversé dans la carte Arduino Uno à partir du logiciel IDE Arduino.
Pour ce travail, vous vous appuierez sur l'activité 4-3 (les diapos de cette activité sont rappelées plus bas ![]() ) et sur la description du fonctionnement ci-dessous.
) et sur la description du fonctionnement ci-dessous.
| Description du fonctionnement : | |
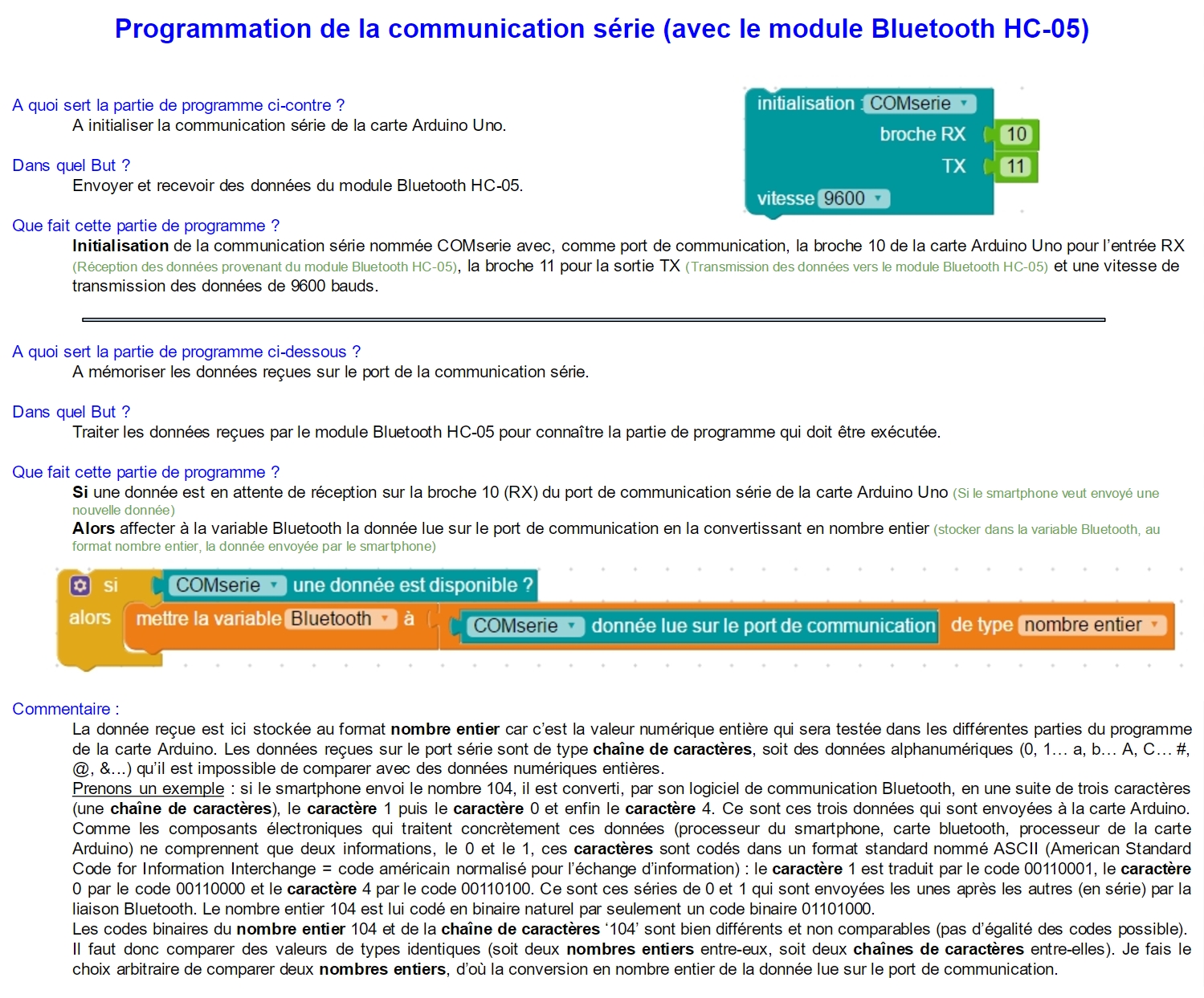
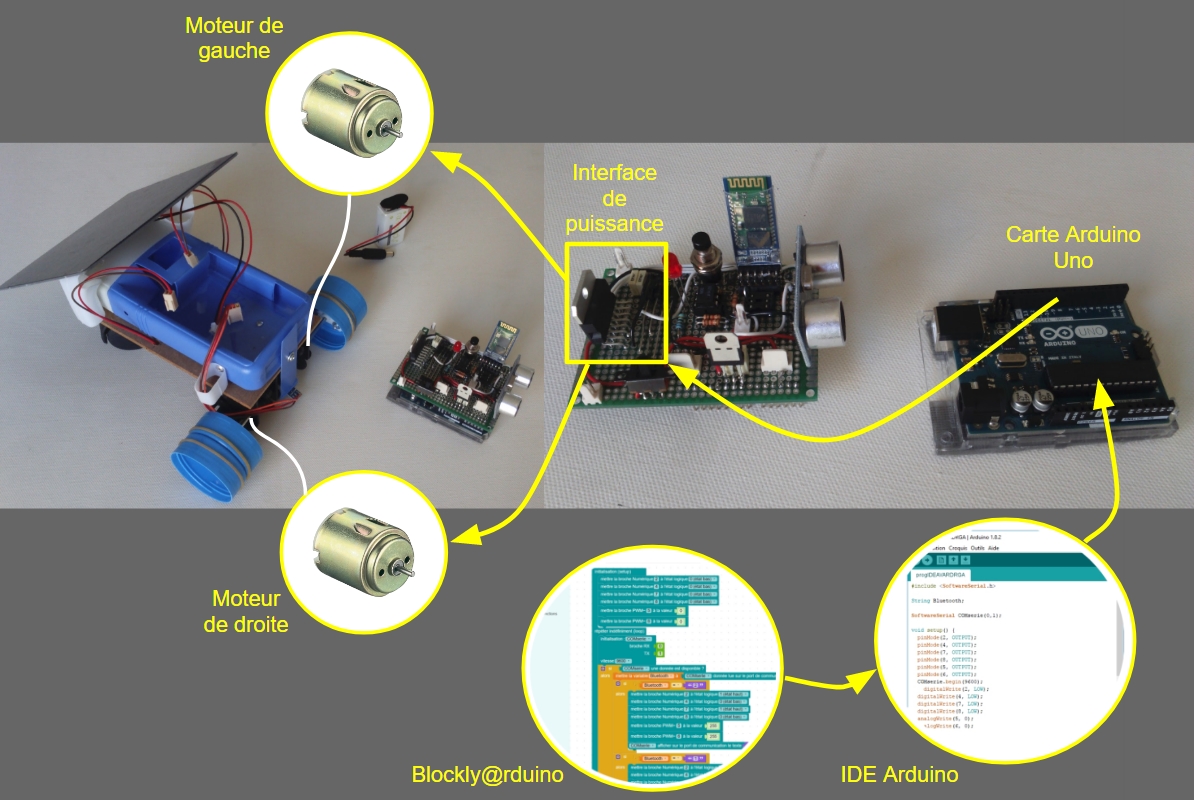
| - le module émetteur-récepteur Bluetooth HC-05 raccordé à la carte Arduino Uno reçoit les ordres de l'opérateur en provenance de l'application Android (application construite à la tâche 36). Ces ordres sont transmis sous la forme de caractères alphanumériques (les caractères 1, 2, 3, 4 et 5), | |
| - les sorties logiques n°2 et 4 de la carte Arduino UNO permettent de définir le sens de rotation du moteur de droite et la sortie logique PWM n°5 permet de définir sa vitesse de rotation, | 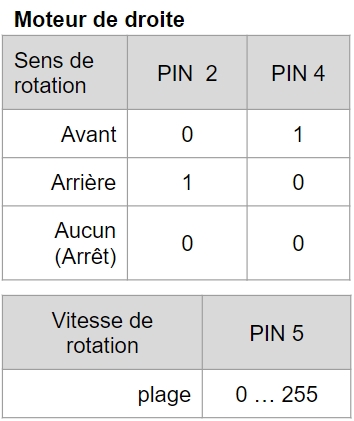 |
| - les sorties logiques n°7 et 8 de la carte Arduino UNO permettent de définir le sens de rotation du moteur de gauche et la sortie logique PWM n°6 permet de définir sa vitesse de rotation, | 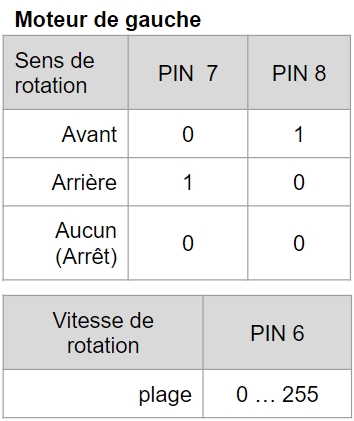 |
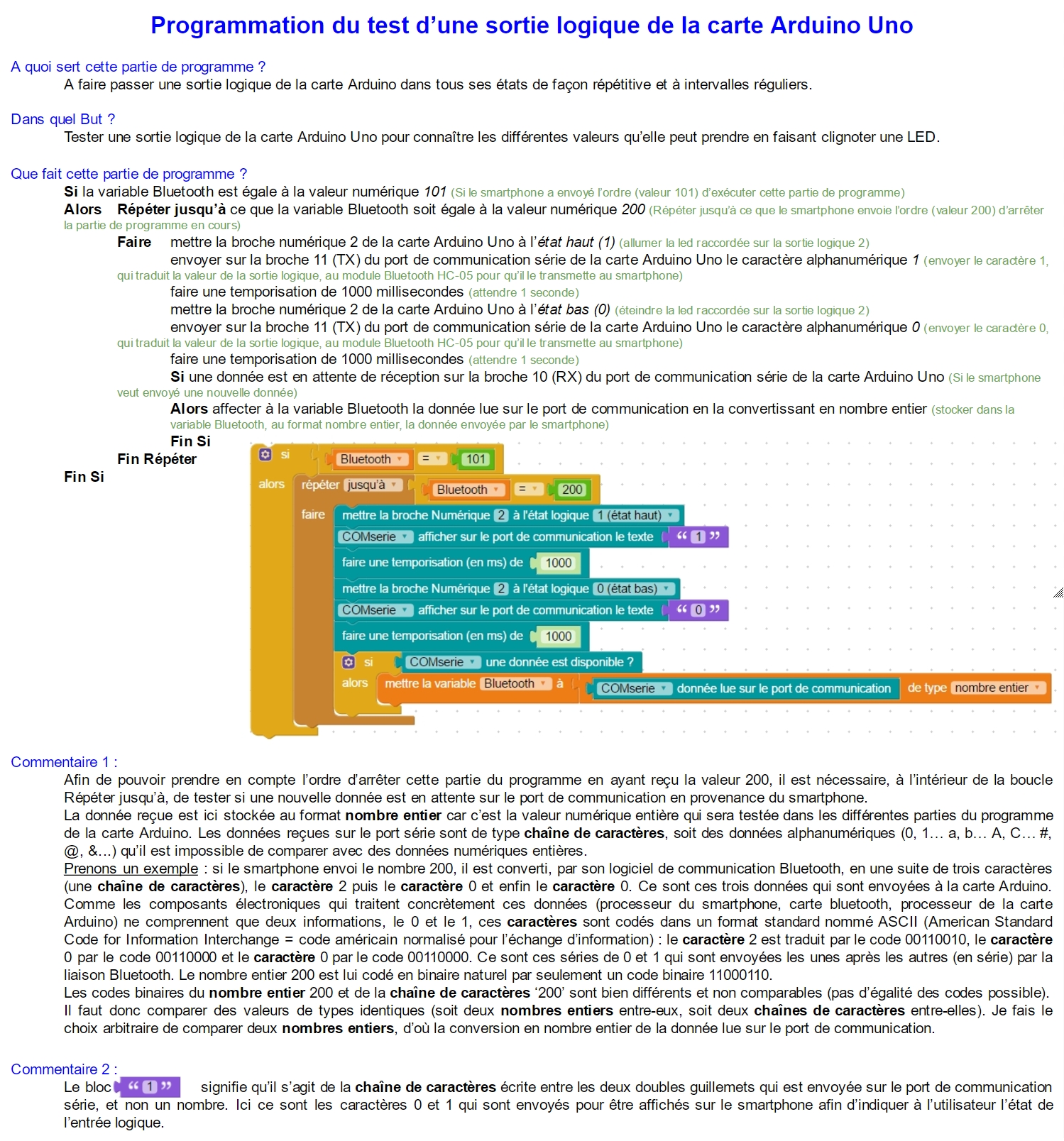
| - le caractère "1" qui est reçu par le module émetteur-récepteur Bluetooth HC-05 correspond à l'ordre AVANT : la carte Arduino UNO doit envoyer à l'interface de puissance les niveaux logiques PIN 2 = 0, PIN 4 = 1, PIN 7 = 0, PIN 8 = 1 et les vitesses PIN 5 = 150, PIN 6 = 150. Voir ci-contre |
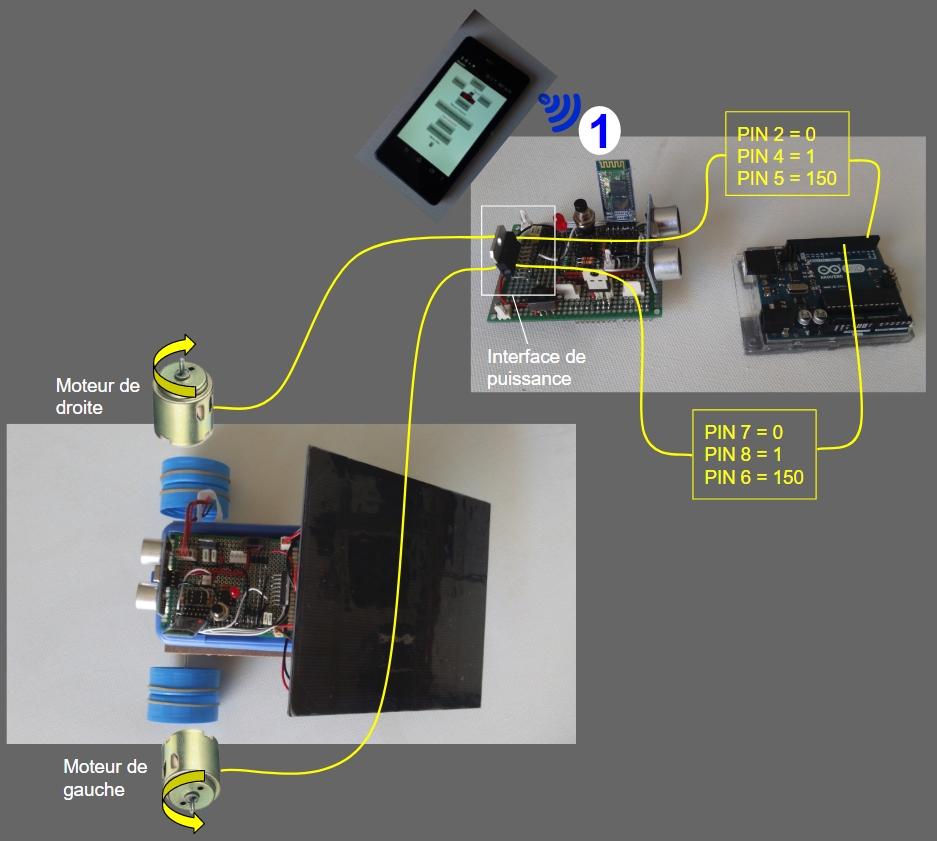 |
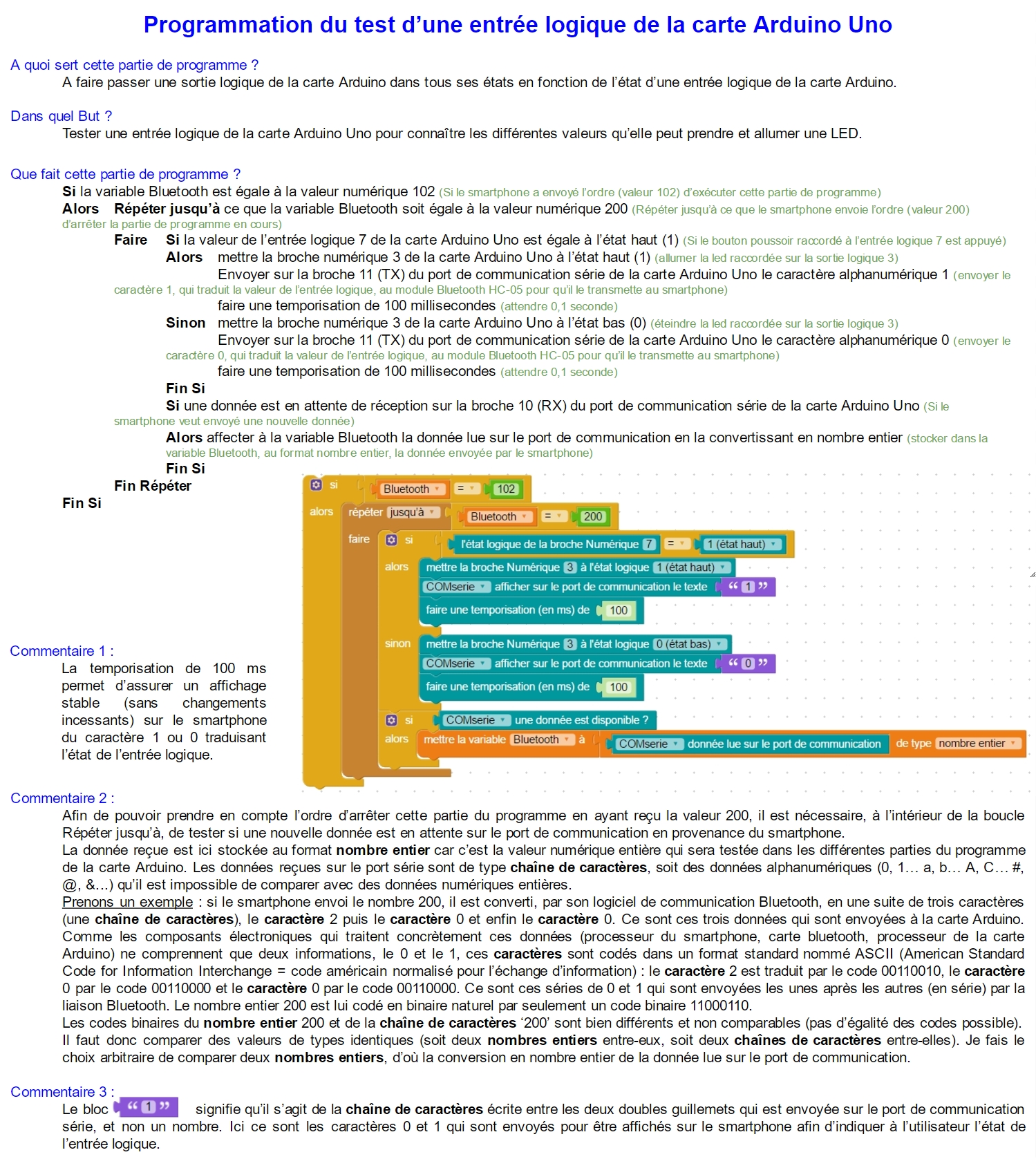
| - le caractère "2" qui est reçu par le module émetteur-récepteur Bluetooth HC-05 correspond à l'ordre ARRIERE : la carte Arduino UNO doit envoyer à l'interface de puissance les niveaux logiques PIN 2 = 1, PIN 4 = 0, PIN 7 = 1, PIN 8 = 0 et les vitesses PIN 5 = 150, PIN 6 = 150. Voir ci-contre |
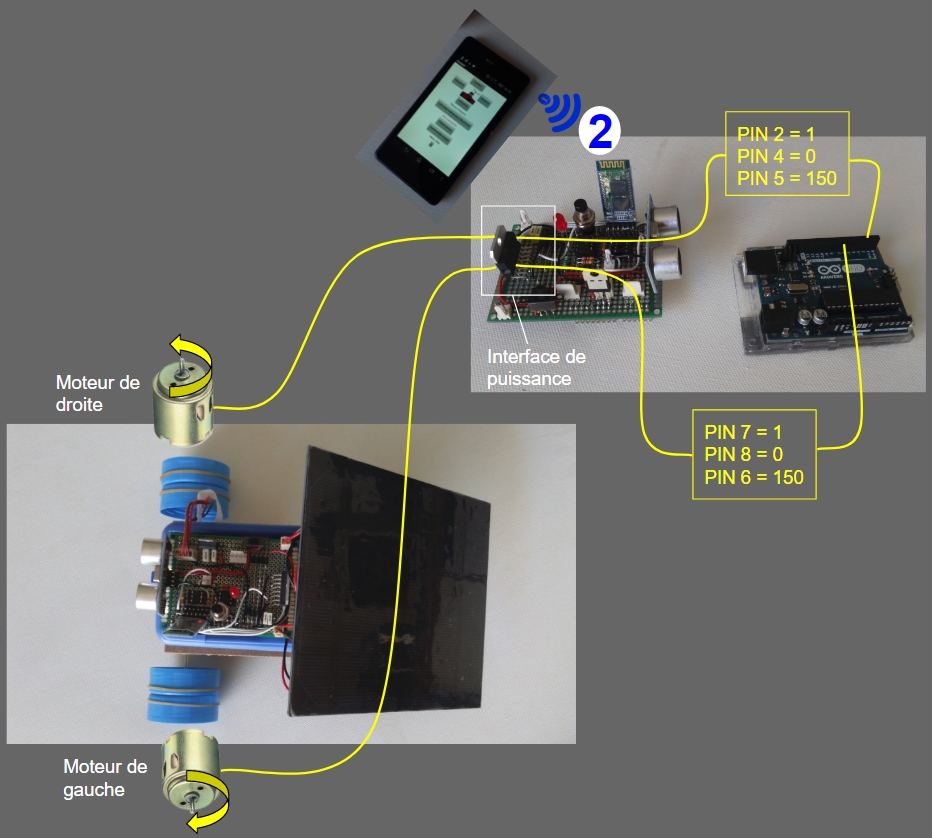 |
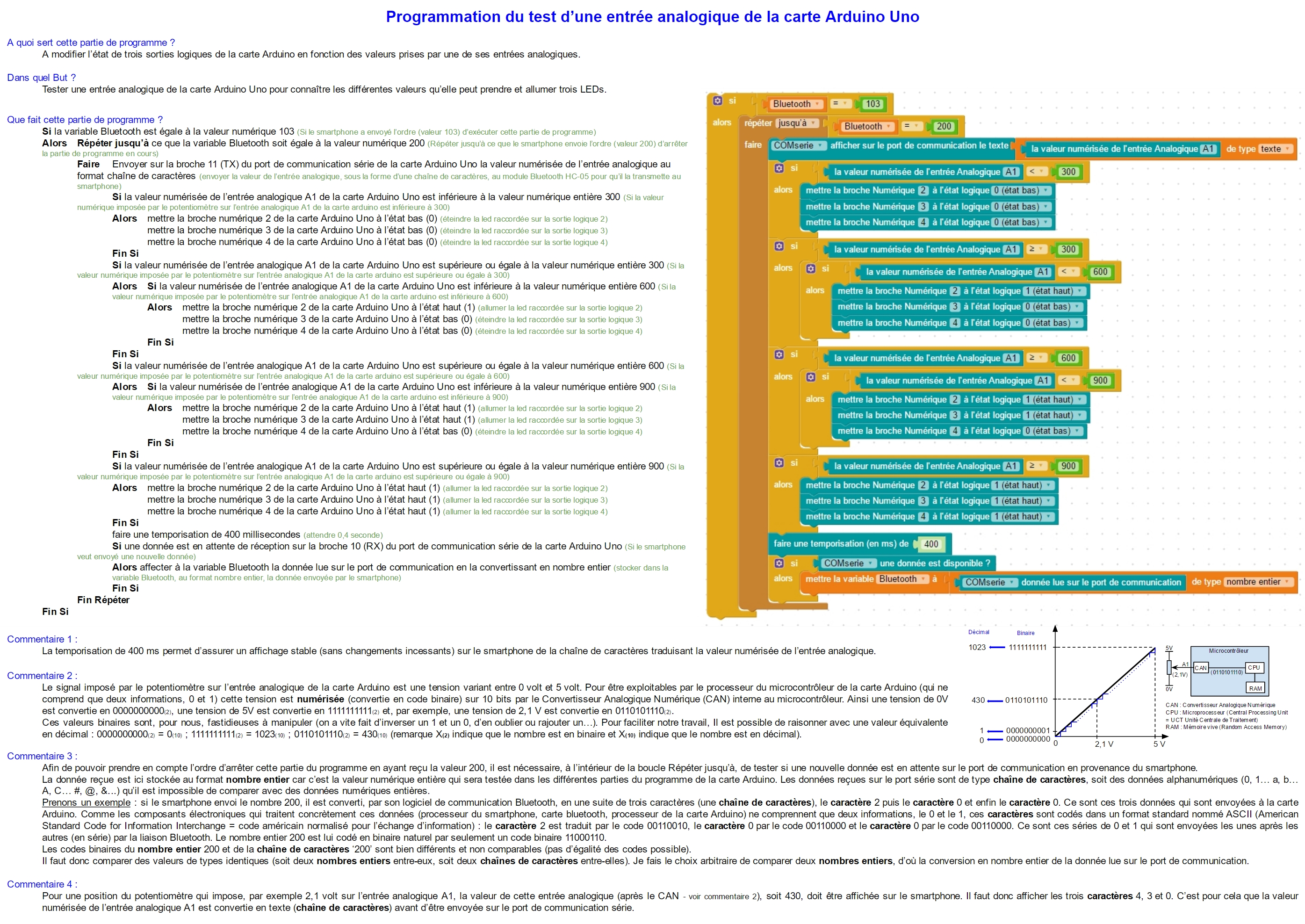
| - le caractère "3" qui est reçu par le module émetteur-récepteur Bluetooth HC-05 correspond à l'ordre GAUCHE : la carte Arduino UNO doit envoyer à l'interface de puissance les niveaux logiques PIN 2 = 0, PIN 4 = 1, PIN 7 = 1, PIN 8 = 0 et les vitesses PIN 5 = 150, PIN 6 = 150. Voir ci-contre |
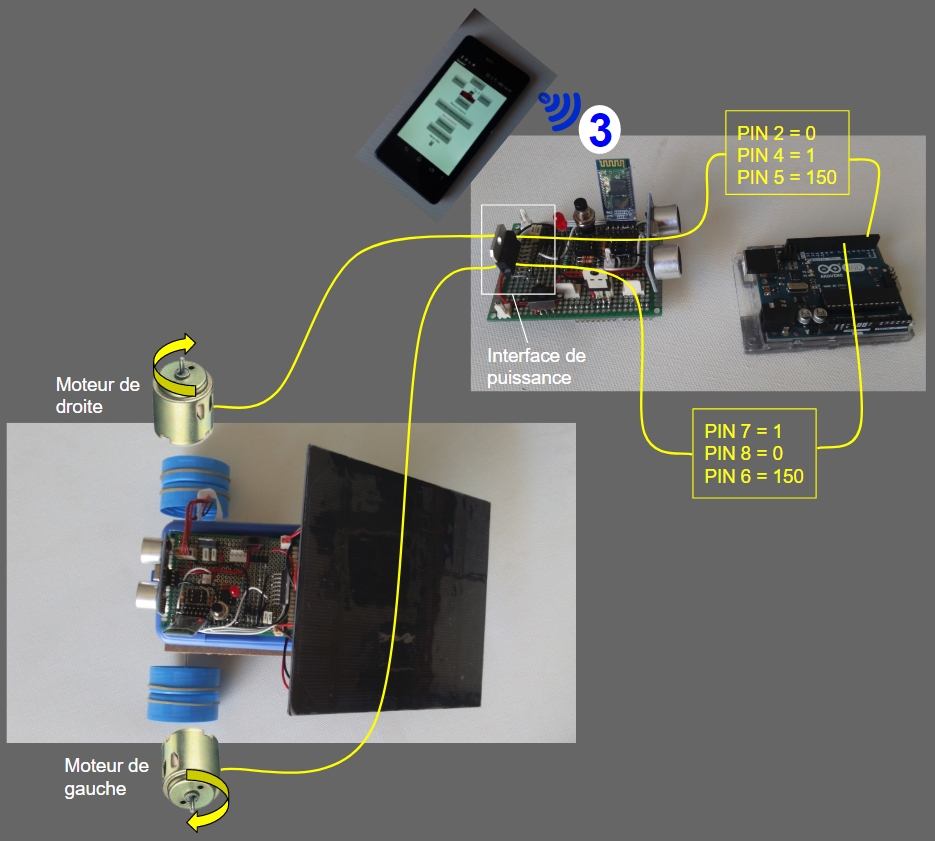 |
| - le caractère "4" qui est reçu par le module émetteur-récepteur Bluetooth HC-05 correspond à l'ordre DROITE : la carte Arduino UNO doit envoyer à l'interface de puissance les niveaux logiques PIN 2 = 1, PIN 4 = 0, PIN 7 = 0, PIN 8 = 1 et les vitesses PIN 5 = 150, PIN 6 = 150. Voir ci-contre |
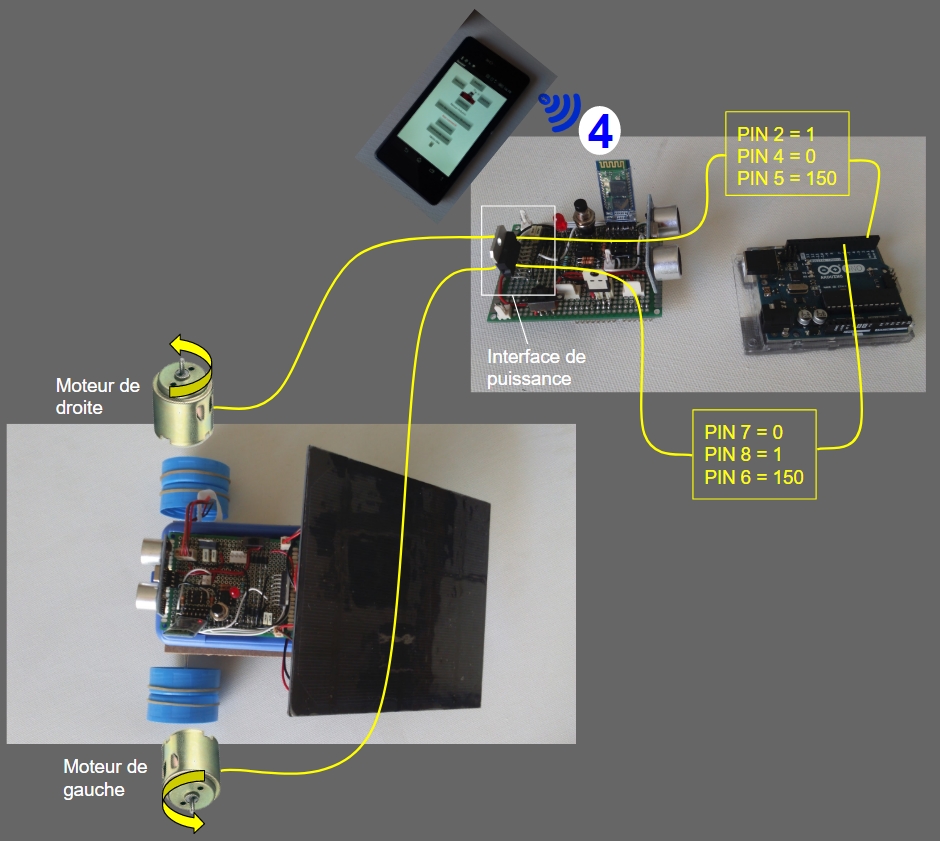 |
| - le caractère "5" qui est reçu par le module émetteur-récepteur Bluetooth HC-05 correspond à l'ordre ARRET : la carte Arduino UNO doit envoyer à l'interface de puissance les niveaux logiques PIN 2 = 0, PIN 4 = 0, PIN 7 = 0, PIN 8 = 0 et les vitesses PIN 5 = 0, PIN 6 = 0. Voir ci-contre |
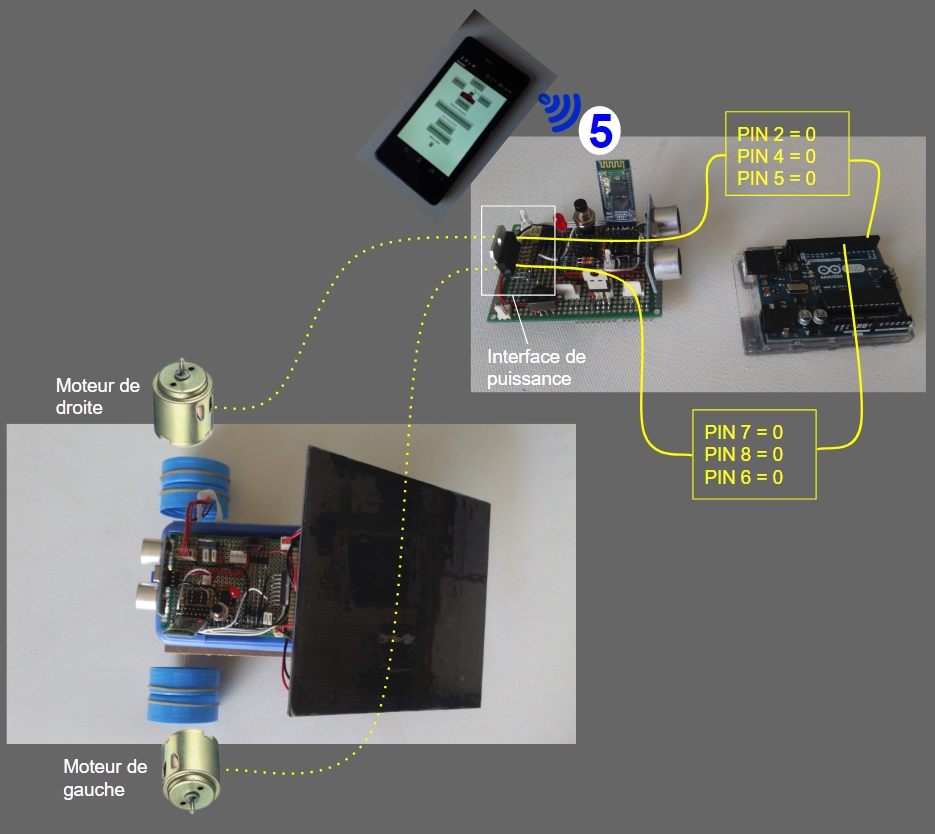 |