Etape 3 - Etude d'un capteur : interrupteur fin de course du robot Robosapien V2
En îlot
|
1- Demander au professeur une mise en situation de l'interrupteur fin de course sur le robot Robosapien V2 présent dans la salle.
Réaliser le travail des trois phases ci-dessous |
|||||


Phase 1
|
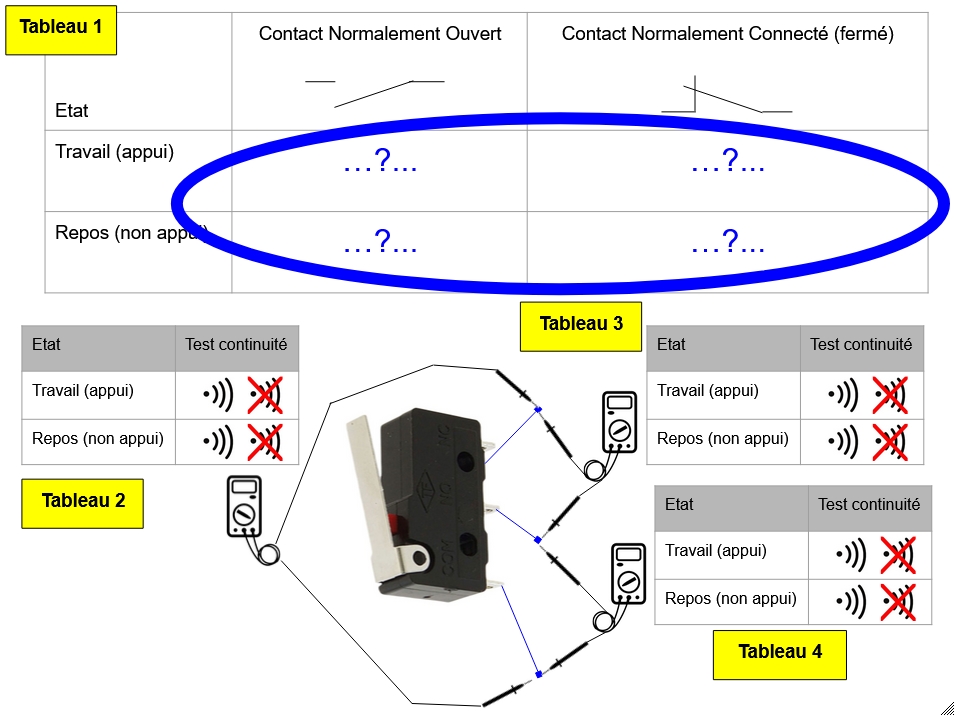
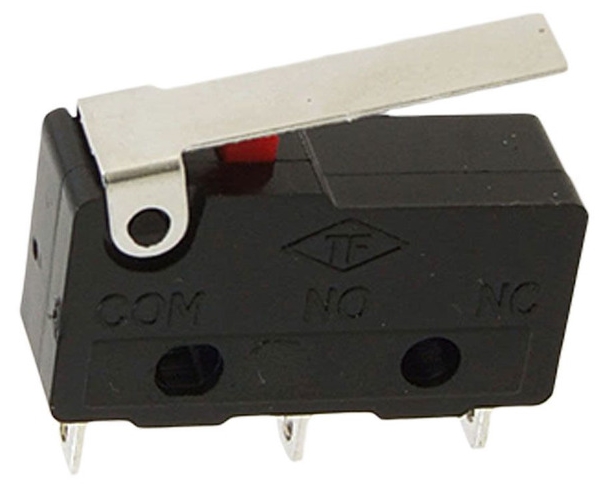
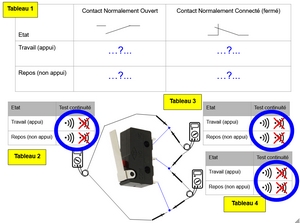
2- Compléter le tableau 1 du document "Tests interrupteur fin de course" situé dans le dossier partagé avec vos Drive "Activité 21 A - 3emeYilotZ", en donnant l'état ouvert ou fermé de chacun des 2 contacts (suivant leurs positions : travail ou repos).
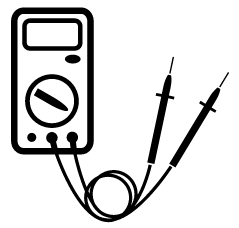
3- Demander au professeur un multimètre a) raccorder le cordon rouge sur le connecteur VΩ et le cordon noir sur COM, b) sélectionner le mode test de continuité ou ohmmètre, c) mettre en contact les pointes de touche pour observer le bon fonctionnement lors d'une continuité électrique entre les pointes de touches (voir ci-dessous le fonctionnement attendu du multimètre suivant le mode choisi),
4- A partir de mesures réalisées au multimètre
5- Faire valider par le professeur. 6- Insérer dans votre document élève "Activité 21 A" une capture d'écran du document "Tests interrupteur fin de course". |
||||||||||||

Phase 2
|
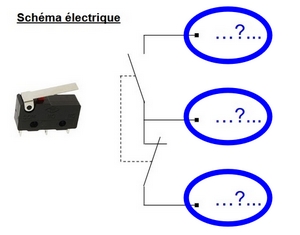
7- Compléter le document "Interrupteur fin de course" situé dans le dossier partagé avec vos Drive "Activité 21 A - 3emeYilotZ", en nommant les trois bornes de raccordement (NO, NC, COM) sur le schéma électrique.
8- Vérifier les réponses précédentes à partir du document complété à la phase 1 "Tests interrupteur fin de course" et des gravures présentes sur l'interrupteur 9- Faire valider par le professeur. 10- Insérer dans votre document élève "Activité 21 A" une capture d'écran du document "Interrupteur fin de course". |
||||
Phase 3
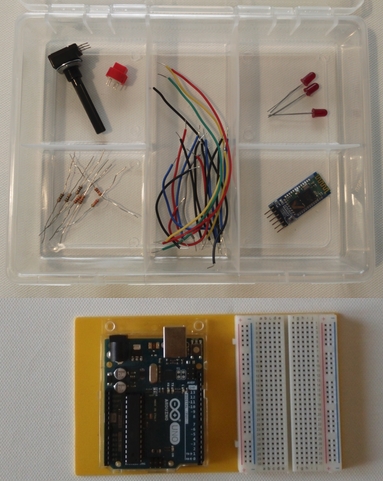
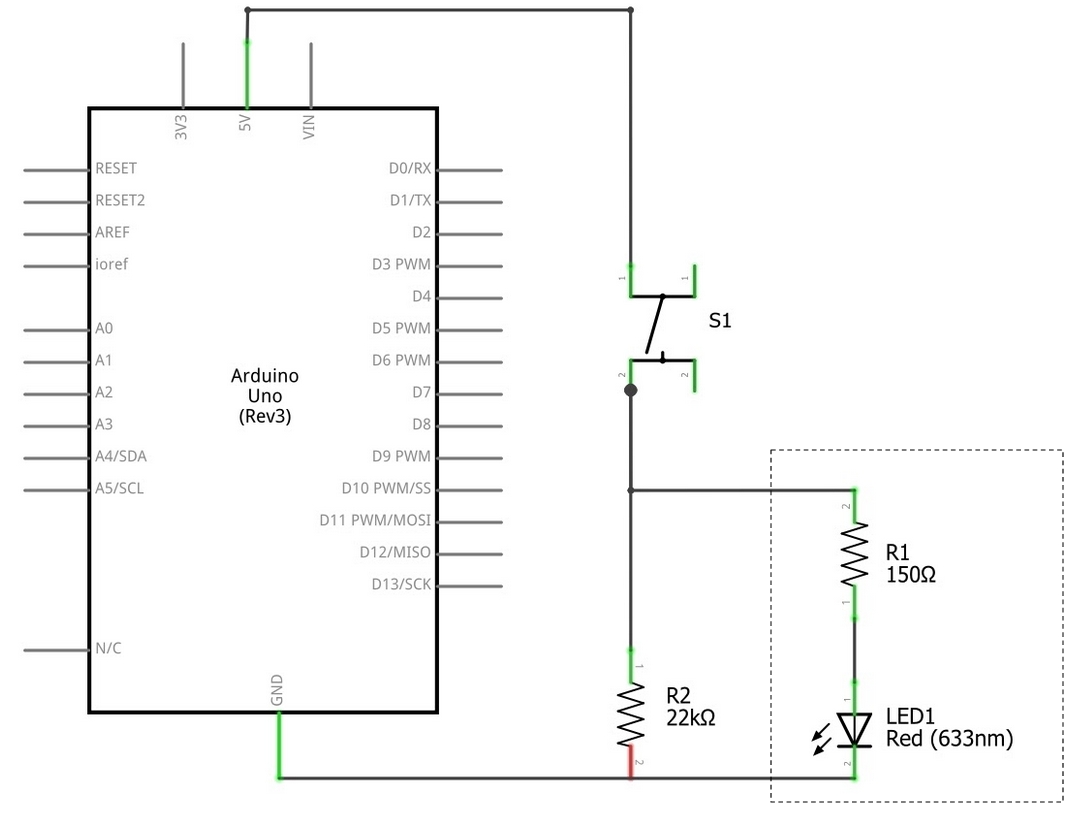
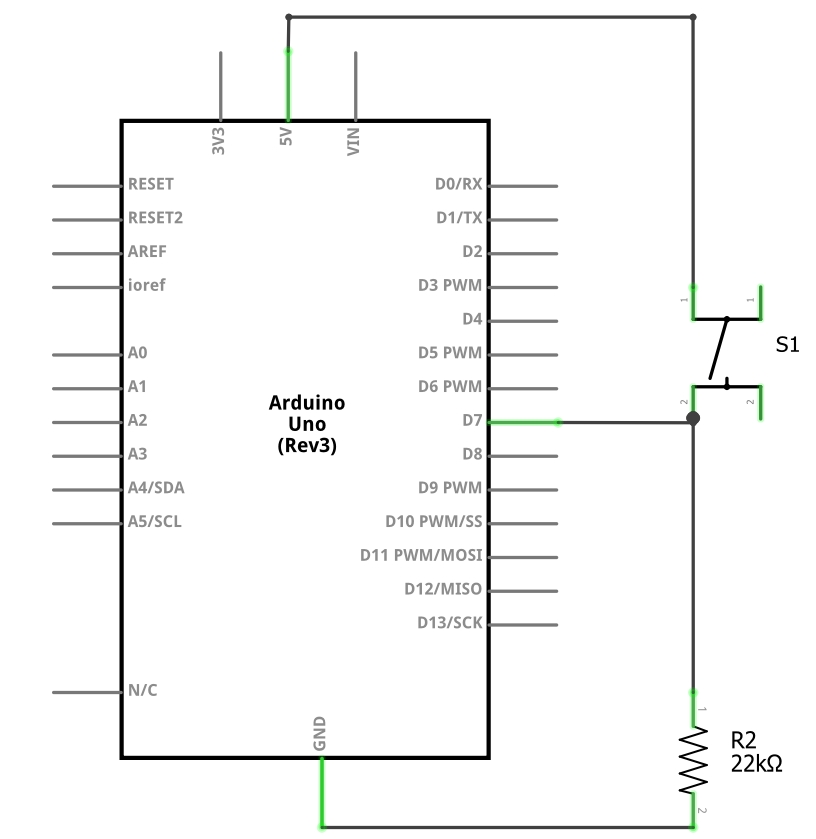
11- Réaliser le montage correspondant au circuit électronique donné ci-dessous (ici, la carte Arduino sert uniquement d'alimentation 0V(GND) +5V pour le circuit).
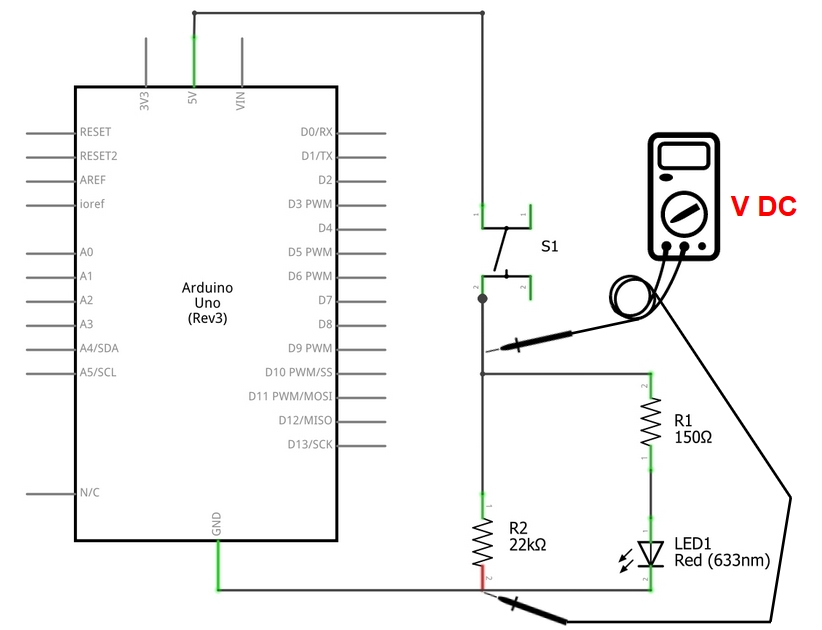
12- Faire valider le montage par le professeur et demander sa mise sous tension. 13- Mesurer au voltmètre (VDC) la tension délivrée par l'interrupteur fin de course pour ses deux états (travail, repos). Noter les deux valeurs dans votre document élève "Activité 21 A" et préciser pour chacune de ces valeurs si la LED est allumée ou éteinte (voir ci-dessous la position des pointes de touche du multimètre).
14- En fonction des valeurs mesurées ou des états de la LED et du tableau ci-dessous, indiquer si le signal délivré par l'interrupteur fin de course est un signal logique (numérique), numérique ou analogique.
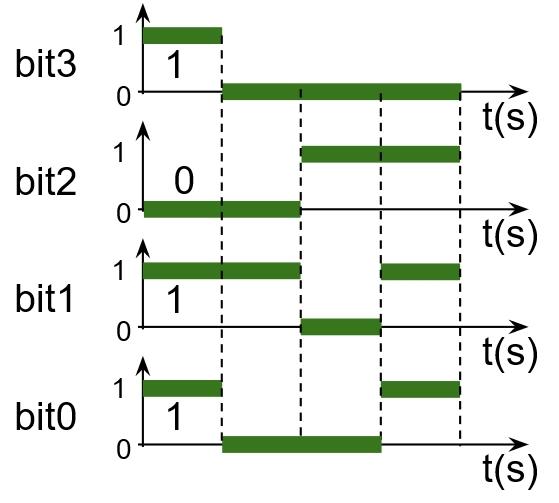
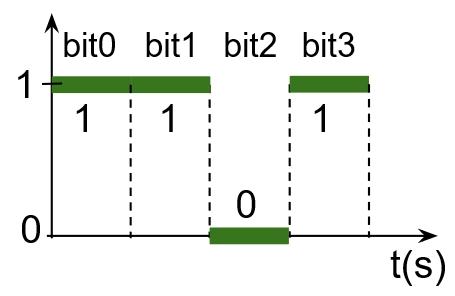
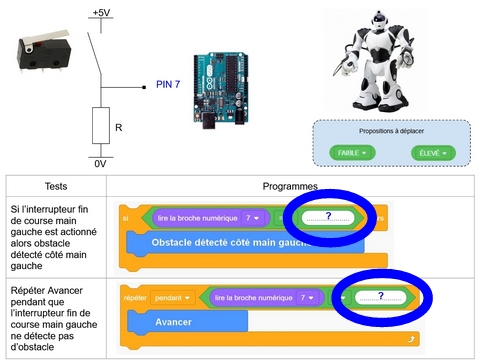
15- Les entrées de la carte Arduino les plus appropriées pour recevoir le signal délivré par l'interrupteur fin de course sont les entrées numériques (PIN 0 à PIN 13) car elles ne détectent que deux états (Haut et Bas). Dans le cas où l'interrupteur fin de course serait raccordé sur l'entrée PIN 7 (voir schéma ci-dessous), compléter les programmes du document "Programme et Interrupteur fin de course" situé dans le dossier partagé avec vos Drive "Activité 21 A - 3emeYilotZ" (déplacer les propositions sur les bons tests). Rappel ci-dessous sur les différents états logiques.
16- Faire valider vos résultats par le professeur. 17- Insérer dans votre document élève "Activité 21 A" une capture d'écran du document "Programme et Interrupteur fin de course". |
||||||||||||||||||||||||||||||||||||



 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 3. |
Ressources
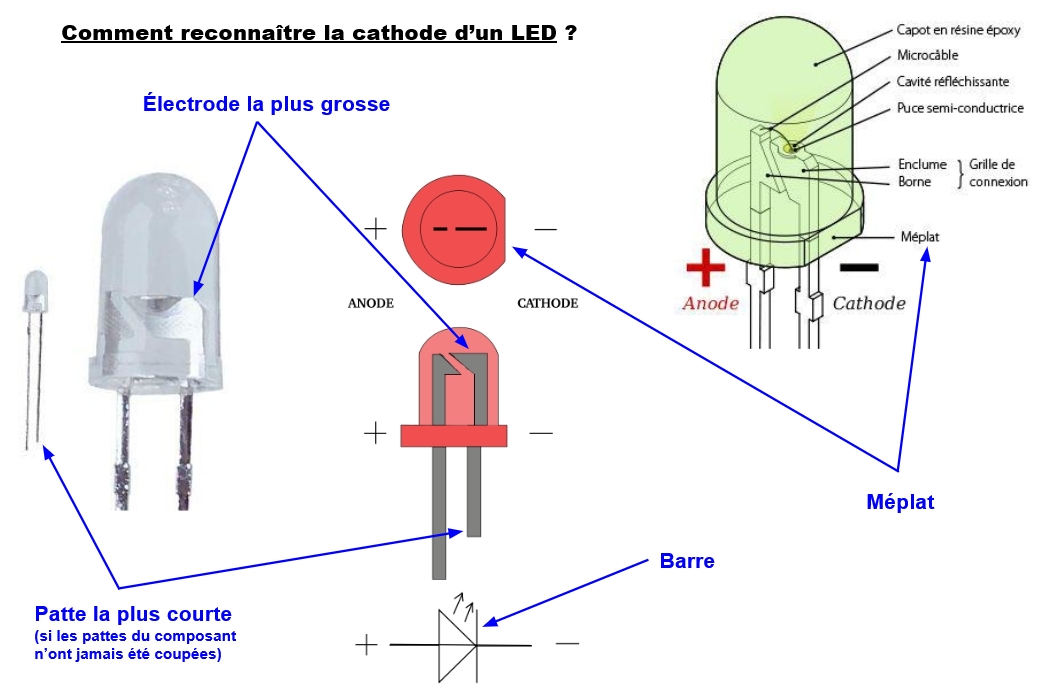
| Lire la valeur ohmique d'une résistance : code des couleurs | Reconnaître la cathode d'un LED : |
|
Source : www.electronique-radioamateur.fr |
Montage photo (sources : www.avacasbl.be ; www.sen.tabesi.over-blog.fr) |