Etape 5 - Sous-programme "Recherche boîte"
En îlot
|
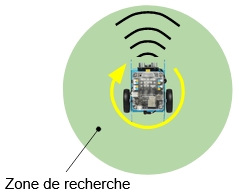
A la lecture du sous-programme "Recherche boîte", répondre dans votre document élève "Activité 3-1" aux questions ci-dessous : 1- Pour détecter une boîte de conserve, le robot tourne sur lui-même en scannant son environnement proche (zone de recherche) avec son capteur à ultrasons.
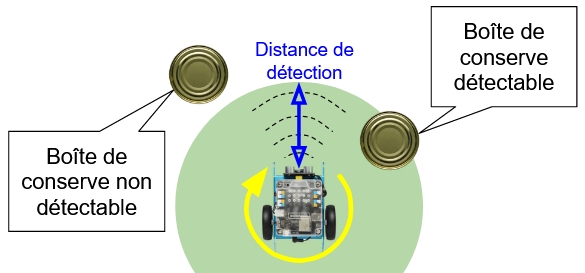
D'après le sous-programme "Recherche boîte", et dans le cas où il ne détecte pas de boîtes de conserves dans la zone de recherche, pendant combien de temps le robot tourne-t'il sur lui-même pour scanner la zone de recherche (les blocs correspondants à l'utilisation du timer (chronomètre) sont expliqués ci-dessus) ? 2- D'après le sous-programme "Recherche boîte", à quelle distance maximale (cm) du robot les boîtes de conserves peuvent-elles être détectées ?
3- Détailler les calculs que fait le microcontrôleur de la carte mCore du robot mBot lorsqu'il exécute le bloc
5- Faire valider par le professeur. 6- Pour chacun des deux cas de la question précédente, indiquer si la boîte de conserve en question est détectée ou non par le sous-programme "Recherche boîte". 7- D'après le sous-programme "Recherche boîte", que se passe-t-il si une boîte de conserve est détectée pendant que le robot est en train de scanner la zone de recherche ? 8- D'après le sous-programme "Recherche boîte", que fait le robot dès qu'il a terminé de scanner la zone de recherche sans trouver de boîtes de conserves ? 9- La deuxième boucle "répéter jusqu'à" du sous-programme "Recherche boîte" est composée d'un OU logique. Compléter le document "OU logique recherche boîte" situé dans le dossier "Activité 31 ilotX" partagé avec votre drive, en donnant les résultats "Vrai" ou "Faux" pour chacune des combinaisons. 10- Faire valider par le professeur puis insérer un capture d'écran dans votre document élève "Activité 3-1". 11- D'après le sous-programme "Recherche boîte", si le bord blanc du plateau n'est pas atteint, qu'est-ce qui va provoquer l'arrêt du déplacement en marche avant du robot ? 12- D'après le sous-programme "Recherche boîte", que fait alors le robot après cet arrêt ? 13- D'après le sous-programme "Recherche boîte", que fait le robot si le bord blanc du plateau est atteint pendant son déplacement en marche avant ? |
 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 5. |
Ressources
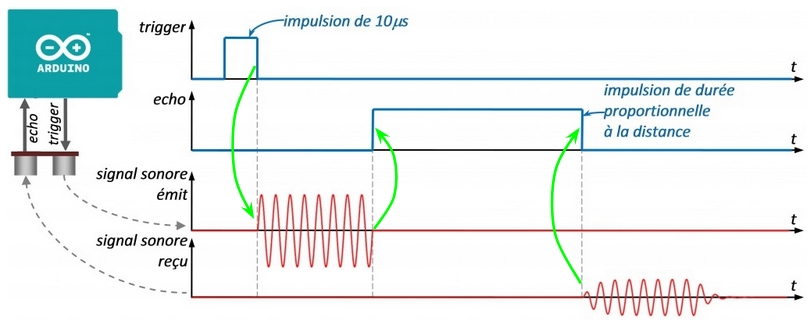
Principe de fonctionnement d'un capteur à ultrasons :
|
Lorsqu'il est appliqué une impulsion de 10 µs sur son entrée trigger, le capteur à ultrasons émet à intervalles réguliers de courtes impulsions sonores à haute fréquence. Ces impulsions se propagent dans l’air à la vitesse du son (~340 m.s-1). Lorsqu’elles rencontrent un objet, elles se réfléchissent et reviennent sous forme d’écho au capteur. Le capteur délivre ainsi à l'unité de traitement (carte Arduino ou autre) une impulsion de durée proportionnelle au temps écoulé entre l’émission du signal et la réception de l’écho.
Un calcul basé sur la formule V = d/t permet alors de déterminer facilement la distance de l'objet à partir de la durée de l'impulsion présente sur la sortie Echo du capteur. |
|
||

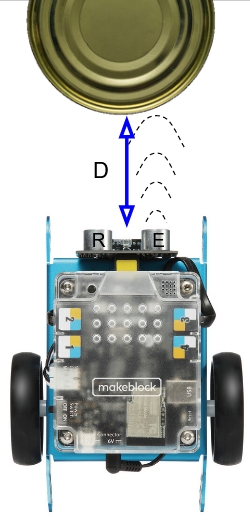
Principe de la détection par ultrasons du robot mBot :
|
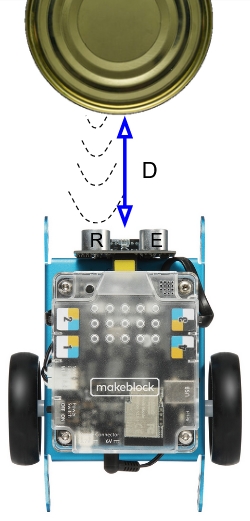
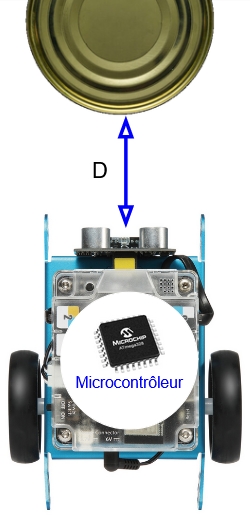
Phase 1 : l'Emetteur du capteur à ultrasons émet une série d'ondes ultrasonores Phase 2 : les ondes ultrasonores sont renvoyées par "ricochet" par l'obstacle se trouvant sur leur passage > le Récepteur du capteur à ultrasons reçoit ses ondes ultrasonores renvoyées. Phase 3 : le microcontrôleur de la carte mCore calcule la distance en cm de l'obstacle en exécutant le script "intégré" dans le bloc |
Phase 1 | Phase 2 | Phase 3 |
 |
 |
 |