Tâche n°13 : Suiveur de ligne noire
Réalisée par l'élève responsable
|
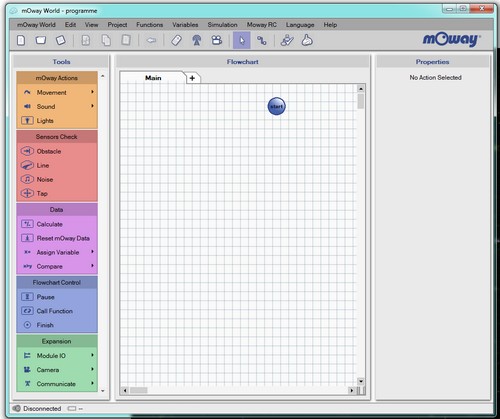
1- Sur le logiciel mOwayWorld, créer un programme qui répond à l'algorithme suivant :
Voir en ressources 2- Vérifier le bon fonctionnement de votre programme sur le robot mOway et corriger si nécessaire jusqu'à obtenir le bon fonctionnement.
|
 |
||
|
3- Enregistrer le programme dans U:(perso) sous le nom tache13. 4- Exporter en JPEG (mOwayWorld/Export/JPG Image) le programme dans U:(perso) sous le nom tache13. 5- Insérer l'image dans le document de travail. |
 |
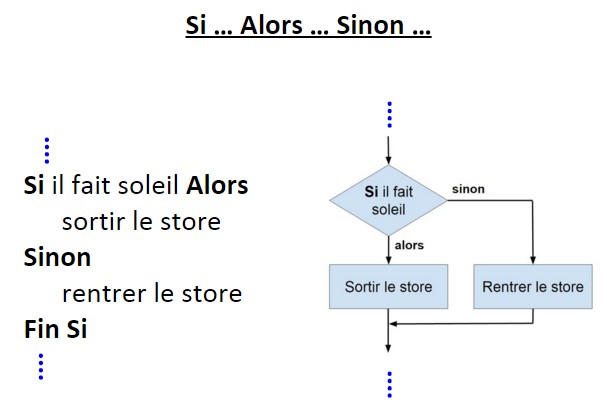
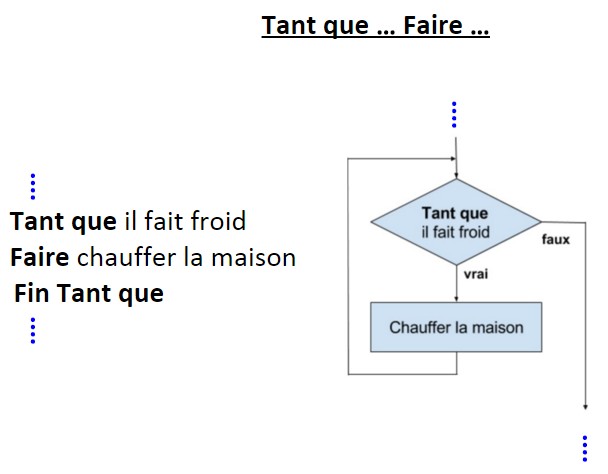
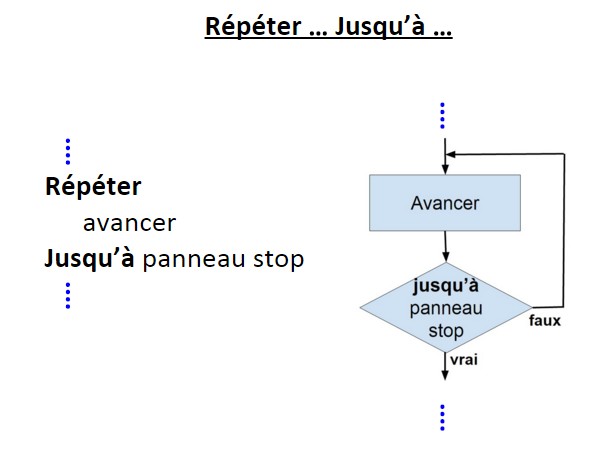
Ressources
Trois structures remarquables pour les organigrammes :